Annexe : documentation complémentaire pour le projet d’autogire autonome
Ce
document complémentaire apporte des informations théoriques au projet
« Libellule ».
1 Annexe :
les limitations et dangers de l’Autogyre
1.1 Détériorations des pales au décollage
1.4 Le marsouinage (PIO: Pilote Induced
Oscillation)
2 Annexes :
questions diverses à traiter pour la solution autogyre
3 Annexe :
composition d’une tête de rotor d’un autogyre
4 Annexe :
avantage et inconvenients des hélicoptères contrarotoriques
5 Comment
fonctionne un dispositif cyclique / collectif de lancement ?
1
Annexe : les limitations et dangers de l’Autogyre
1.1 Détériorations des pales au décollage
La mise en rotation des pales, juste après le démarrage du
moteur, au décollage, est difficile (assimilable au démarrage d’une voiture en
5°).
Une vitesse de roulage trop rapide en regard des tours rotor
peut entraîner le "battement" des pales, celles.ci se mettent à
battre d'une butée à l'autre et peuvent endommager sérieusement la tête du
rotor.
Remèdes :
Par la formation et pratique, apprendre à rouler à la bonne
vitesse au décollage.
Il faut aussi mettre le rotor à l'horizontale dans les
virages et près des obstacles.
Dans la check-list de la prévol prévoir une inspection
soignée des pales et de la tête.
1.2
Passer au « 2ème régime »
Le 2ème régime peut se caractériser plus simplement par une vitesse devenue si basse qu'il est impossible de garder une altitude même en poussant les gaz à fond. Par exemple: après un décollage, on parcourt à quelques fractions de mètres toute la piste à très faible vitesse et forte puissance moteur. Dans cette configuration il est probable que l'on sera au 2° régime et qu'il sera impossible de prendre de l'altitude en bout de piste !
Autre cas : en vol, faire un virage dos au vent sans bien
contrôler sa vitesse, cette configuration fatale en avion peut au maximum
obliger l'autogire à un poser non voulu.
Remèdes :
Avoir suffisamment de vitesse ou de réserve de puissance
moteur. Ce que ne peut faire un avion qui décroche, un autogire le peut :
remonter comme sur un escalier en mettant la "pêche".
1.3
Voler à G nul ou négatif
Cette situation est très dangereuse. Si vous réalisez une trajectoire
ascendante en forme de cloche, vous vous retrouverez en train de flotter dans
votre siège : vous serez à zéro G. Cette trajectoire est mortelle en autogire.
Remèdes :
Il ne faut pas essayer des manœuvres acrobatiques ou
extrêmes avec un autogire. Il ne faut pas faire la "cloche !", des
mises en montée brutales, des virages violents. Il faut faire des manœuvres
simples.
1.4
Le marsouinage (PIO: Pilote Induced
Oscillation)
Cette situation dangereuse est certainement la plus connue dans le milieu de l'autogire. L'oscillation induite par le pilote (PIO) ou marsouinage touche surtout les débutants au cours de leurs premiers vols. Cette situation se traduit par un mouvement de tangage de l'appareil qui, alternativement, monte et plonge de plus en plus brutalement. Cette oscillation non contrôlée peut devenir destructrice : les pales touchent l'hélice ou la dérive, ou bien le rotor passe en G négatif et n'est plus alimenté. C'est ce problème qui a conduit à une profusion de critiques à l'égard des autogires.
Le déclenchement du marsouinage est dû au fait que le pilote
est trop lent sur le manche. Si la machine lève le nez, il corrige en réduisant
les gaz et en mettant le manche en avant. Mais l'appareil se comporte comme un
pendule suspendu au rotor et est déjà prêt à revenir vers le bas. L'action du
pilote va aggraver la plongée qui suit qu'il va corriger en augmentant les gaz
et en mettant le manche en arrière. Mais de nouveau son action a lieu au moment
ou l'appareil commence à revenir vers l'avant. Le résultat se traduit par une
montée encore plus forte. Et inexorablement les actions du pilote augmentent
ces oscillations et rendent de plus en plus méchantes les montées et les plongées.
Remèdes :
Il faut une bonne formation au pilotage autogire ... ainsi qu' un bon stabilisateur horizontal...
La construction de la machine est un gage de sécurité, trop
souvent méconnu. Un stabilisateur suffisant rend les machines bien plus sures. de
La Cierva préconisait une surface de stab horizontale selon une formule reprise
avec succès par Ronald Herron (ROTOPUP@aol.com) :
Surface du stab x longueur du bras de levier au 1/4 de la corde du stab =
volume du stab =12 à 15 % du volume du volume du Rotor= 12 à 15 % surface
portante des pales (corde x longueur) x diamètre rotor.
Pour un "Bensen" avec un rotor de 700 cm. et une corde de 18cm., on
doit avoir: 18 x 700 x 700 =8820000 cm3 = volume rotor 15% de ceci = 1323000
cm3. Si le 1/4 de la corde du stab est a 120 cm. de l'axe du rotor, un stab
d'une surface de 11025 cm2 (60 X 183 cm ou 40 X 275cm ) conviendrait.
Source : http://www.autogiro.be/html/modules.php?name=Content&pa=showpage&pid=30&newlang=french
2 Annexes : questions diverses à traiter pour la solution autogyre
Est-ce qu’un autogire a besoin d’un pré-rotateur
(pré-lanceur) pour voler ?
Les autogires, en général, n' enont pas besoin pour devenir
aéroportés, mais n'ayant pas de pré-rotateur vous inévitablement et pour
augmenter sensiblement votre distance de décollage. Il y a cependant des couples et des facteurs additionnels devant
être pris en compte.
Avec un puissant pré-lanceur, un peut théoriquement obtenir
la vitesse de rotor presque à la vitesse de décollage.
Il faut tenir compte de la vitesse du vent de face au
décollage.
Il faudra que notre « paramotogyre » n’est pas
besoin de prélanceur. Ce qui devrait être le cas.
La distance de décollage :
Le « Citation » de Chayair part en maximum 150
mètres.
Il faut tenir compte que les distances de décollage sont
variables, d’un autogire à l’autre.
Si par malheur, notre « paramotogyre » avait besoin d’une distance de décollage longue, pour un être humain, obligeant à courir, cela ôterait tout intérêt à l’engin, comparativement à un paramoteur (avis de l’auteur de ce document).
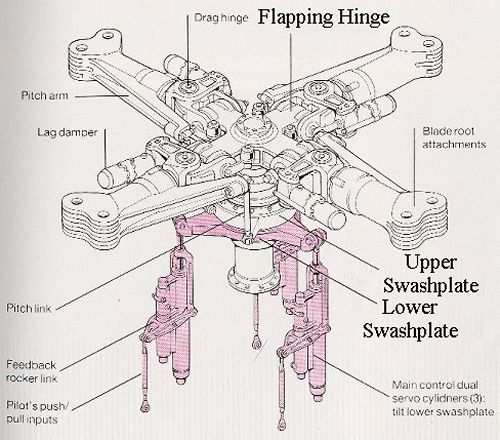
3 Annexe : composition d’une tête de rotor d’un autogyre
Exemple : Tête de rotor AVERSO (type « AX-05 » modèle
V-4) :
Cette tête de rotor est composée :
1) D’un moyeu tournant,
2) D’une articulation de cardan réglable,
3) D’un plateau denté,
4) D’un ensemble pignon à engrènement automatique,
5) D’un levier de commandes avec amortisseurs de vibrations,
6) D’un bloc frein.

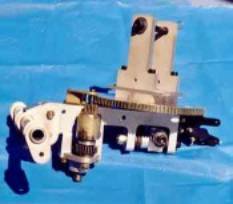


Les longueurs des rotors (AVERSO) varient entre 700 cm et
850 cm
Source : http://www.averso.info/tetrotor.html
4 Annexe : avantage et inconvenients des hélicoptères contrarotoriques
Puisqu'un coaxial ne produit pas de couple, aucune puissance de moteur n'est gaspillée avec un rotor de queue, ce dernier ne produisant aucun ascenseur (poussée verticale) ou poussée vers l'avant. En éliminant la « perche » de queue, l'arbre d'entraînement du rotor de queue, la boîte de vitesse, et d'autres dispositions ont également sauvé un poids considérable et ont réduit le « tirage » (drag).
La configuration coaxiale a eu plusieurs inconvénients.
Les hélicoptères coaxiaux ont montré une commande directionnelle faible dans les forces vers l'avant de commande de vol et de lacet renversées pendant les autorotations.
Pour commander la direction d'un rotorcraft (aéronefs à rotor) coaxial, un pilote a l'habitude d’utiliser le même ensemble de commandes que celles qui guident les hélicoptères simple rotor : leviers collectifs et cycliques, et pédales de lacet. Malheureusement, la méthode de commande d'axe de lacet est différente entre les deux types. Au lieu de la « plume » ( ?) des lames (pales) d'un rotor de queue pour pivoter un hélicoptère autour de son axe de lacet, les pédales aux pieds du pilote d'une « plume » coaxiale, [on fait pivoter ?] alternativement les lames sur les rotors principaux pour embarder (pour faire pencher) l'hélicoptère à gauche ou bien à droite. Un hélicoptère simple de rotor exige des charnières sur chaque lame de rotor principale. Comme transitions d'hélicoptère au vol vers l'avant, les charnières permettent aux lames (pales) de se déplacer indépendamment les uns des autres, car une lame (pale) tourne en avant et produit de plus d'ascenseur que la lame (pales) retraitant (se retirant) vers l'arrière vers la queue. Les deux rotors d'un hélicoptère coaxial décommandent hors des effets asymétriques d'ascenseur dans chaque rotor. C'est ici que les hélicoptères coaxiaux payent leur plus grande pénalité dans la condition pour (de manque ( ?) de charnière) les lames de rotor principales très fortement « rigides ». Les lames doivent être rigides pour les empêcher d’entrer en contact. Il n'était pas possible de fabriquer les lames en bois assez rigides pour empêcher se s’agiter excessivement (d’avoir un ballant / ballottement excessif), ainsi Hiller a produit les premières lames principales de rotor pratiques, entièrement en métal.
Source : http://www.nasm.si.edu/research/aero/aircraft/hiller_xh44.htm
(texte traduit en français avec le traducteur automatique du
site de Google. Nous nous excusons par avance des erreurs de traduction).
5 Comment fonctionne un dispositif cyclique / collectif de lancement ?
Titre de l’article : How CCPM (Cyclic/Collective Pitch Mixing) (+)
works ?
Note : Cet article concerne un modèle d’hélicoptère
contra-rotatif radiocommandé
le "Blade CP RTF Electric Micro Helicopter", Ref.:
EFLH1100
(voir sur le site « Hobby zone », dont l’adresse
Web est indiquée ci-après en fin de cet article).
(+) CCPM (Cyclic / Collective Pitch Mixing - Mélange
cyclique / collectif de lancement)


Collective Pitch
With collective pitch input, all three servos move together in the same
direction to provide crisp, positive collective pitch response.
Fr : Lancement Collectif :
L'entrée collective de lancement, chacun des trois servos rapproche la même
direction pour fournir à des chips, réponse collective positive de lancement.


Elevator "Pitch"
When elevator input is given, all three servos move together, tilting the
swashplate fore and aft.
Fr :
Ascenseur "Lancement" : Quand l'entrée d'ascenseur est donnée, chacun des trois servos
rapproche, inclinant le swashplate longitudinalement.


Aileron (Roll)
When aileron input is given, both rear servos move together, tilting the
swashplate left and right.
Fr :
Aileron (Roulement) :
Quand l'entrée d'aileron est donnée, les deux servos arrière
rapprochent, inclinant le swashplate à gauche et à droite.
http://www.hobbyzone.com/rc_helicopters_e-flite_blade.htm
6
Aérodynamique
DISPOSITIFS AÉRODYNAMIQUES DES HELICOPTERES COAXIAUX
Eduard PETROSYAN, sous-chef
concepteur de CONFIGURATION (Design), de Kamov Company
De nos jours, l'industrie d'hélicoptère du monde utilise
deux configurations - les hélicoptères de simple rotor et les rotor coaxiaux
avec la plupart des hélicoptères comportant les pionniers du simple-rotor
configuration. Les pionniers de la construction des hélicoptères étaient
pleinement averti bien des avantages fondamentaux présentés par la
configuration coaxiale. L'abondance des
projets et des tentatives des hélicoptères coaxiaux de bâtiment à de diverses
heures sont connues. Cependant, c'était
seulement les hélicoptères avec simple-rotor comportant le rotor de queue que
les concepteurs occidentaux sont parvenus à mettre dans l'opération étendue. Des hélicoptères de Simple-rotor ont été
développés et largement répandus la Union soviétique et en Russie aussi. En développant l'industrie nationale
d'hélicoptère, des fonds considérables et les efforts ont été utilisés par ce
pays dans le développement ultérieur de la configuration de simple-rotor, qui,
cependant, n'a pas traité certaines défauts fondamentaux inhérentes à ce
configuration.
EN 1947, concepteur soviétique que « N.i. Kamov »
a débuté son travail sur le développement réel des hélicoptères de
coaxial-rotor. Au cours des 50 années,
la compagnie de Kamov a développé et a mis dans la production de série beaucoup
d'un hélicoptère coaxial: Ka-10, Ka-15,
Ka-18, Ka-25, Ka-26, Ka-27, Ka-29 aussi bien que Ka-32 mondialement renommé et
le requin Ka-50 noir.
En raison de leur petite dimension, rapport élevé de poussée
à poids, manoeuvrabilité superbe et symétrie aérodynamique, des hélicoptères
coaxiaux ont été largement répandus pendant que l'avion d'aile rotatoire
soutenu par bateau fonctionnait par la marine soviétique. L'aviation civile a commencé l'opération
étendue de Ka-26s coaxial et de Ka-32s.
Par le 70s en retard à 80s tôt, toutes les choses nécessaires étaient
apparues pour le développement d'un hélicoptère Ka-50 plus tard indiqué de
coaxial-rotor de combat. Concurrence
rude et prix ( ?), entre le Ka-50 et le mil Mi-28, avec le dernier
comportant la configuration classique de simple-rotor, a eu comme conséquence
la victoire impressionnante de Ka-50's et qui a été retenue par l'armée
russe. L'hélicoptère coaxial de
configuration est dû tellement spécial au fait qu'il applique un principe de la
compensation réactive de moment fondamentalement différente de celle de la
configuration de simple-rotor. Pour
compenser le moment réactif du rotor principal de l'hélicoptère de
simple-rotor, là devrait être développé la force latérale du rotor de queue
appliquée au fuselage, alors que l'hélicoptère de coaxial-rotor a les moments
réactifs de ses rotors se compenser directement à leur axe de rotation. Ceci enlève le besoin de toutes les forces
additionnelles. Les moments réactifs
des rotors sont compensés automatiquement dans tout le vol, de ce fait
n'exigeant aucune interférence de la part du pilote.
Un rotor coaxial comportant un moment réactif zéro dans le
vol équilibré est le fait que le pilote actionnant les pédales crée la
disparité les moments réactifs entre des moteurs supérieurs et inférieurs avec
le moment réactif récapitulatif résultant étant employé comme possibilités de
commande de direction.
La méthode réactive de compensation de moment utilisée dans
l'hélicoptère de simple-rotor exige l'attention constante du pilote à ajuster
la force latérale du rotor de queue pour maintenir l'équilibre de l'hélicoptère
dans tout le vol, de ce fait mettant l'hélicoptère à certain inconvénient. En ce qui concerne la puissance,
l'hélicoptère coaxial a un bord considérable au-dessus de ses contre-parties de
simple-rotor, puisque toute la puissance libre est transférée à la commande de
rotor, c.-à-d. utilisé pour développer l'ascension, alors que la puissance
d'énergie de rotor de la queue de l'hélicoptère de simple-rotor représente
10-12% de puissance totale.
Un autre dispositif important de la configuration coaxiale
est indiqué quand l'hélicoptère plane.
La course supérieure de rotor se développe considérablement plus étroite
dans l'avion inférieur de rotor, qui permet au rotor inférieur de sucer en air
additionnel augmentant de ce fait la course de rotor en coupe et réduit la
puissance utilisée pour développer la contre-rotation d’ascension. Les rotors
coaxiaux contribuent à une réduction significative de la puissance, qui est
exigée pour tourbillonner le gicleur.
Le vol d’essai aussi bien que d'autres données expérimentales montre que
les rotors coaxiaux étaient 6-10% plus efficace par rapport à l'hélicoptère de
simple-rotor.
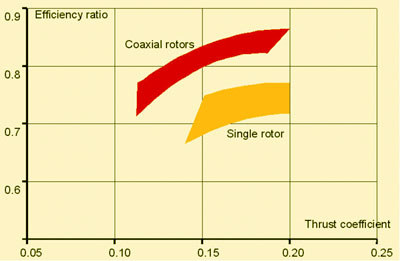
Qualité
aérodynamique des rotors coaxiaux et du rotor simple, dans le vol plané.
Etant donné l'hélicoptère de coaxial-rotor ne doit pas
employer la puissance pour compenser le moment réactif, les hélicoptères
coaxiaux semblent être 16-22% plus efficace que l'avion de simple-rotor.
Les considérations ci-dessus de puissance fournissent à la
configuration coaxiale l'avantage substantiel dans le plafond de vol plané (par
500-1.000 m) et taux vertical d'élever (par 4-5 m/sec).
Malgré le fait que le mât de système de jumeau-rotor crée
une plus grande drague pour l'hélicoptère coaxial par rapport à son
simple-rotor vis-à-vis du nombre, l'essai en vol des hélicoptères de
coaxial-rotor et de simple-rotor du même type n'a montré aucune augmentation
évidente de la drague, qui est dû aux raisons suivantes:
effet mutuel bénéfique des rotors coaxiaux dans le vol vers
l'avant;
il apparaît comme effet de cellules de biplan et assure la
réduction substantielle de la puissance qui est développée par le moteur pour
créer l'ascenseur;
manque du rotor et du besoin de queue de l'actionner;
le manque de la drague de rotor de queue et de
l'interférence négative du rotor de queue et de la queue grondent;
mesures prises en concevant l'hélicoptère de coaxial-rotor
(Ka-50) avec peu de drague (c.-à-d. en rétractant le train d'atterrissage en
vol).
La configuration coaxiale permet l'hélicoptère, tout en
étant plus petite et l'allumeur que le simple-rotor un, comporter l'avantage
tactique important.
Pour évaluer les changements de la dimension et du poids
d'hélicoptères de simple-rotor et de coaxial-rotor, elle se comprend de
comparer les cas suivants:
les hélicoptères à rotor coaxiaux et de simple-rotor ont le
mêmes poids aéroporté et puissance disponible développés par leurs moteurs
(Ka-50 et Mi-28);
les hélicoptères de coaxial-rotor et de simple-rotor ont les
lames de rotor du même diamètre (Ka-50 et Ah-64).
En premier lieu la configuration coaxiale a en réduisant la
taille d'hélicoptère de rotor coaxiaux par 35-40% par rapport au
simple-rotor. C'est principalement dû à
la réduction de grâce du diamètre du rotor à une plus grande finesse dans le
vol plané, le manque de perte de puissance du manque du rotor de queue et le
besoin de support il sur la partie arrière du fuselage - en dehors du secteur
balayé, par les lames (pales), du rotor principal.
Dans le deuxième exemple, comportant peu de finesse et perte
de puissance additionnelle en conduisant le rotor de queue, l'hélicoptère de
simple-rotor a un peu de poids disponible de vol. Dans ce cas-ci, la présence du rotor de queue mène à la dimension
de l'hélicoptère étant 20% davantage que cela de la coaxiale.
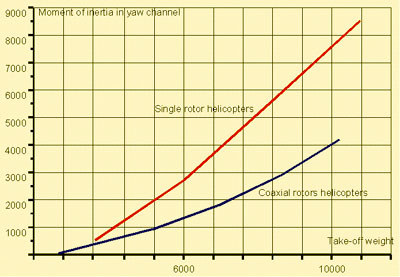
Mouvement
d'inertie, des hélicoptères à rotor coaxial et à simple rotor.
La réduction de l'hélicoptère de coaxial-rotor de la taille
et de la distribution différente de poids le long du fuselage a comme
conséquence la réduction considérable des moments longitudinaux et
directionnels de l'inertie.
C'est fondamental pour fournir la contrôlabilité exigée de
l'hélicoptère.
La symétrie aérodynamique est le dispositif le plus
important de l'hélicoptère coaxial.
Elle augmente sensiblement sa contrôlabilité et stabilité. Avec le progrès dans la
hélicoptère-fabrication, les concepteurs se sont à plusieurs reprises tournés
vers des configurations aérodynamiques symétriques, comprenant le plein puits
l'importance de la symétrie aérodynamique pour réaliser la facilité de
commander l'hélicoptère.
L'expérience d'usine d'avion à ailes fixes est exemplaire à
cet égard.
Seulement des avions symétriques sont construits.
Il est difficile d'imaginer un avion avec deux moteurs
réglés à de divers points de leurs ailes respectives et poussée différente se
développante dont la disparité changerait selon le mode de vol.
Cependant, les lotisseurs d'hélicoptère acceptent la
configuration asymétrique de simple-rotor le prenant comme mal évitable
hâtivement pour la simplicité perçue de cette solution technologique.
En même temps, dans la pratique, développant un rotor
efficace de queue et sa transmission avérés être un ordre grand.
La symétrie aérodynamique de la configuration coaxiale est
fournie par le manque de moment réactif sur le fuselage, relativement
étroitement rotors supérieurs et inférieurs et leur effet mutuel bénéfique, qui
a comme conséquence peu de différence dans leurs poussées une fois
équilibré.
Les forces latérales des rotors ont dirigé dans l'équilibre
différent de directions avec leur moment latéral, qui émerge en raison de leur
séparation, étant insignifiant.
Grâce au manque du rotor de queue, l'hélicoptère de
coaxial-rotor n'est pas sujette à l'effet constant de la force latérale
alternative. La conception coaxiale
assure une combinaison sans heurt de commande efficace et de l'atténuation
aérodynamique, qui fournit la bonne contrôlabilité.
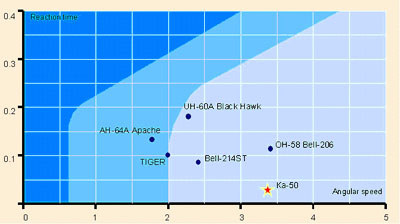
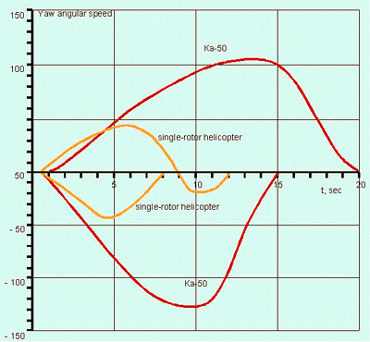
Niveaux de
contrôlabilité d'hélicoptère (vol plané et fréquence vol/banking
(posé ?)).
Par exemple, les caractéristiques latérales de
contrôlabilité de Ka-50's ont été évaluées sous le niveau d'Ads-33c (conditions
manuelles de commande aux hélicoptères militaires) du département d'aviation
d'armée des USA. L'image montre les
résultats de l'évaluation pour planer et vol à vitesse réduite.
Elle est évidente le niveau 1 (excellente contrôlabilité)
d'allumette ( ?) de caractéristiques de la contrôlabilité Ka-50 de la
norme d'Ads-33c avec le Ka-50 ayant le bord significatif en valeur de retard et
la fréquence par rapport à l'autre hélicoptère. En raison de la symétrie
aérodynamique, l'hélicoptère de coaxial-rotor n'a littéralement aucune relation
entre le mouvement longitudinal et latéral.
Cependant, il a la commande indépendante, facilité du vol il
et est facile de maîtriser par n'importe quel pilote indépendamment de ses
qualifications de vol.
La symétrie aérodynamique change l'hélicoptère
nettement.
Le manque de variables de mode de vol, de moment de lacet et
de force de côté de sur le fuselage, aussi bien que le manque d'une relation
entre le changement la puissance (lancement collectif) et la commande
directionnelle et latérale, améliore la stabilité de l'hélicoptère coaxial et
contrôlabilité.
En raison de ceci, sûreté de vol augmente et le vol en état
extrême devient plus facile, qui est particulièrement vrai dans la mesure où
vol de faible altitude, petit atterrissage capitonne, terrain cassé, altitude
barométrique élevée et l'échec de systèmes sont concernés.
En raison de ceci, sûreté de vol augmente et le vol en état
extrême devient plus facile, qui est particulièrement vrai dans la mesure où
vol de faible altitude, petit atterrissage capitonne, terrain cassé, altitude
barométrique élevée et l'échec de systèmes sont concernés. Le contrôle des hélicoptères de
coaxial-rotor est aussi simple que l'avion de formation initiale de vol. En même temps, jusque leur stabilité, la
contrôlabilité et la manoeuvrabilité sont concernées, ils pourraient donner à
leurs rivaux de simple-rotor par course pour leur argent.
l'environnement Rapide-changeant du combat moderne et du
besoin en gagnant l'avantage tactique a mis haut à l'ordre du jour la nécessité
dans des vitesses et des modes d'extension appropriés à la manoeuvre
d''appartement ', c.-à-d. la manoeuvre a prévu pour changer la direction du vol
sans utilisation de g-charge régulière.
L'efficacité sans restriction de l'hélicoptère coaxial en
exécutant la manoeuvre plate est enracinée dans sa conception. La configuration coaxiale concentre toutes
les fonctions importantes dans le rotor coaxial : développement de l'ascenseur, de la commande de force,
longitudinale et directionnelle de propulsion aussi bien que la commande de
lancement collective.
La concentration du système de commande entier dans le rotor
coaxial et la disponibilité des possibilités directionnelles de commande de
rotor coaxial par la disparité en moments fournit à des hélicoptères de
coaxial-rotor un autre dispositif important - le système de commande devient
presque indépendant de l'angle de la glissière. C'est ceci et le manque du rotor de queue qui présente des moyens
sans limites d'exécuter des manoeuvres plates aux angles élevés de la
glissière.
L'empennage de l'hélicoptère de coaxial-rotor ne place
aucune restriction sur la valeur de l'angle de la glissière puisqu'on s'attend
à ce que traite changer de l'angle de la glissière à moins de 180 degrés.
Une manoeuvre radicalement nouvelle - tour 'plat '- a été
examinée par l'utilisation du Ka-50 et acceptée pour l'usage. À la vitesse de jusqu'à 90-100 km/h cette
manoeuvre pourrait être exécutée à 180 degrés tous les deux à gauche et à
droite dans le plan horizontal tandis qu'à une vitesse de jusqu'à 230 km/h elle
est exécutée à moins de 90 degrés dans les deux directions avec les opérations
bancaires étant de près de zéro.
Le tour plat est purement une manoeuvre de combat assurant
diriger de l'arme statique vers la cible dans le temps le plus court possible
Ceci fait l'anneau encombrant monter inutile tout en gagnant le temps valable
dans la rotation aux angles élevés avec la botte. Le manque du rotor de queue permet à l'hélicoptère coaxial
d'employer tous les avantages de sa commande directionnelle et de développer
des taux d'embardée de haute sans des restrictions tout en manoeuvrant. Bien que les hélicoptères de simple-rotor
revendiquent un plus grand moment directionnel disponible de commande, ce
moment ne peut pas être utilisé dedans complètement, qui est particulièrement
vrai pour l'entrée pointue de commande d'étape. C'est dû aux restrictions au taux de lacet provoqué par des
considérations de force de rotor et de transmission de queue, la force
insuffisante de la perche de queue et les attentions accordées à la
contrôlabilité de maintien si le rotor de queue entre dans l'anneau de
vortex. Sur l'acceptation de ce qui précède,
le manque du rotor de queue permet à l'hélicoptère d'être commandé dans le plan
horizontal en frappant les pédales rapidement, qui a en tournant plus
rapidement à l'angle exigé. En raison
de l'invariabilité de la marge directionnelle de commande couplée aux
variations de l'altitude planante jusqu'au plafond de vol plané, ces
possibilités tournent jusqu'à soient un avantage tactique significatif
essentiel à gagner le duel.
Vitesse
angulaire de lacet dans le vol plané.
L'utilisation de la manoeuvre plate en des hélicoptères de coaxial-rotor assure le décollage et le débarquement indépendamment de la force et de la direction du vent.
En débarquant sur de petites garnitures ou quand les obstacles sont présents, cette méthode de décollage et de débarquement accorde les avantages opérationnels et tactiques les plus importants.
Examinons certaines particularités des hélicoptères de coaxial-rotor et de simple-rotor manoeuvrant dans le plan horizontal. U
ne telle manoeuvre est témoin d'une vitesse pointue de changement en vol, qui influencent la manoeuvrabilité d'hélicoptère.
La réalisation de la g-charge verticale exigée est effectuée principalement en augmentant l'angle de lancement et l'angle d'attaque du rotor avec le taux de g-charge selon la valeur d'angle de lancement et le taux, c.-à-d. selon les possibilités longitudinales de système de commande - son efficacité et puissance.
Plus la commande longitudinale sont plus efficace, plus l'angle de lancement et changement de g-charge avec le taux de croissance de g-charge n'a aucun temps pour diminuer est rapide, qui rend la manoeuvre plus efficace.
Si la manoeuvre s'avère justement ne pas être assez efficace, les baisses de vitesse plus rapidement que la g-charge se développe, qui pourrait avoir comme conséquence les problèmes avec réaliser le g-chargement exigé. Les hélicoptères de Coaxial-rotor comportent une efficacité et une puissance bien meilleures de commande longitudinale que ceux simple-rotor.
Ceci est fourni par peu de moments de l'inertie et plus grands moments disponibles de commande dus à de grandes valeurs des bras de la force appliqués aux moyeux des rotors supérieurs et inférieurs dus à leur séparation.
Ce qui précède est confirmé par des dépendances de statistique de l'accélération disponible maximale et de l'accélération longitudinale des hélicoptères de coaxial-rotor et de simple-rotor.
Une plus grandes efficacité et puissance de commande de vantardise, l'hélicoptère de coaxial-rotor écrit le piqué avec une meilleure efficacité et une plus grande sûreté.
Le point est en écrivant le piqué, les commandes sont poussés en avant avec la baisse résultante la g-charge verticale, en courbant de la trajectoire et l'augmentation de la vitesse angulaire du fuselage de la plongée.
En niant cette vitesse angulaire en tirant les commandes pour entrer dans le piqué régulier, le mouvement s'agitant de lames de rotor augmente plus rapidement que les changements angulaires de vitesse de cellule.
Si ceci est accompagné du changement insuffisant de la vitesse angulaire due à l'inefficacité de la commande longitudinale (comme cela des hélicoptères de simple-rotor), la collision de la perche de queue et les lames de rotor est possible en raison de leur mouvement contradictoire.
Ainsi, l'efficacité et la puissance de la commande longitudinale de l'hélicoptère coaxial assure une manoeuvre plus efficace et plus sûre accompagnée d'une diminution du g-chargement vertical. Les hélicoptères coaxiaux ont un avantage substantiel dans la manoeuvre horizontale à vitesse réduite, qui augmente leur efficacité et « survivabilité » de combat.
Ces avantages sont produits par grâce superflue de puissance au manque du rotor de queue et de la finesse meilleure du rotor coaxial par rapport au rotor simple à un à vitesse réduite.
Par conséquent, l'hélicoptère de coaxial-rotor a l'accélération dépouillante de plus grand vol plané en comparaison de ses contre-parties de simple-rotor et, par conséquent, de peu de temps d'accélération de réaliser la vitesse exigée.
La présence du rotor de queue place des limitations rigoureuses sur la vitesse dépouillante de vol plané due à la menace du rotor de queue entrant dans l'anneau de vortex. les caractéristiques aérodynamiques d'hélicoptère de Coaxial-rotor fournissent se déplacer du vol plané dans n'importe quelle direction à une vitesse de jusqu'à la capacité maximum du système de commande.
La manoeuvre à vitesse réduite est beaucoup plus sûre quand vous pilotez un hélicoptère de coaxial-rotor.
Quand l'hélicoptère, accéléré à l'arrière, accélère accidentellement à la vitesse à laquelle le manche frappe la limite, la seule chose que le pilote doit faire est de braquer la pédale et de tourner l'hélicoptère coaxial à 180 degrés à une grande vitesse angulaire.
Tout en examinant des manoeuvres horizontales, on devrait noter deux manoeuvres principales - le tour (coordonné) correct qui est exécuté presque identiquement en des hélicoptères de simple-rotor et de coaxial-rotor, et une manoeuvre radicalement nouvelle appelée l''entonnoir '.
Le but tactique de l'entonnoir est que l'hélicoptère, tout en exécutant l'entonnoir, peut maintenir les cibles au sol dans les réticules et les engager pendant longtemps en dépit de l'angle négatif de lancement.
Autrement, le maintien de l'angle de lancements de négatif mène à l'accélération, à la perte de la cible et au besoin de passages multiples, qui est accompagné des coupures dans le feu. Ceci dégrade la probabilité de coup et augmente la vulnérabilité de l'hélicoptère. La manoeuvre d'entonnoir donnant un avantage essentiel dans le combat peut être exécutée seulement en des hélicoptères de coaxial-rotor.
L'entonnoir est exécuté à une vitesse de 100-180 km/h à un angle négatif de lancement de jusqu'à 30-35 degrés et est, en fait, un tour latéral, dans l'exécution que les angles de lancement et d'opérations bancaires commercent des endroits.
Quand l'entonnoir est exécuté, le rotor a poussé le constituant parallèle au plan horizontal est dirigé vers le centre du cône notionnel et équilibré par les forces de l'inertie, qui émergent tandis que l'hélicoptère tourne le long de la trajectoire proche-circulaire à un angle de glissade de 90%.
Ainsi, les entonnoirs basés sur la capacité du rotor coaxial d'effectuer profondément le dérapage et le mouvement latéral à une grande vitesse.
Le tour accéléré est une manoeuvre de combat trop et est utilisé pour changer rapidement la direction du vol. Il pourrait être efficace dans les cibles au sol attaquantes et dans le combat aérien au cours frontal.
La particularité des tours accélérés faits en des hélicoptères de coaxial-rotor est leur utilisation profondément du dérapage, qui augmente considérablement l'efficacité de la manoeuvre.
C'est dû au manque des restrictions à la vitesse angulaire de la rotation et de la capacité d'exécuter des tours accélérés avec profondément (60 degrés.) dérapage, qui augmente l'efficacité du tour.
L'hélicoptère de coaxial-rotor a ces possibilités dû au manque du rotor de queue.
Les hélicoptères à rotor coaxial ont des avantages en exécutant d'autres manoeuvres.
Ces avantages deviennent vraiment impressionnants quand l'hélicoptère fait des manoeuvres comme un tour tout en exécutant un bourdonnement, pendant lequel la grande vitesse angulaire est une chose nécessaire aussi bien car profondément le dérapage est.
Pour le couvrir tout, les hélicoptères de coaxial-rotor peuvent exécuter des acrobaties aériennes: 'boucle oblique ', roulement, etc.. croissants.
Tout en exécutant des acrobaties aériennes, l'hélicoptère développe des angles de lancement de jusqu'à 90 degrés avec des opérations bancaires atteignant 130-140 degrés.
La symétrie aérodynamique, la bonne stabilité, la contrôlabilité et la manoeuvrabilité fournissent le développement du système automatique de stabilisation et de commande d'hélicoptère de coaxial-rotor capable d'automatiser beaucoup de modes de vol, y compris assez de complexe terrain-étreindre - le vol, etc...
L'opération des hélicoptères de Coaxial-rotor en modes extrêmes valent la peine d'examiner aussi. Leur taux vertical minimum de descente dans l'autorotation sont 1m carré moins par rapport à cela des hélicoptères de simple-rotor avec le même chargement.
C'est dû à l'effet de cellules de biplan du système coaxial de rotor réduisant la perte induite de puissance comme décrit ci-dessus.
En outre, en dépit du poussé bas ( ?) dans l'autorotation, le rotor de queue de l'hélicoptère de simple-rotor prend certaine puissance, de ce fait en s'ajoutant à l'augmentation du taux vertical de descente d'hélicoptères de simple-rotor. Le taux vertical minimum de l'hélicoptère coaxial de combat avec le chargement de 57,3 kilogrammes par m carré par rapport à cela de l'hélicoptère de simple-rotor de la même classe avec le chargement de 43,4 m carré est 8-10% davantage.
La différence n'a aucun impact sur l'atterrissage dû à ce qui suit: la symétrie aérodynamique de la configuration coaxiale, la simplicité de commande, le manque d'interconnexion (par exemple 'lancement collectif - pédales ') et la commande longitudinale efficace fournissent au coaxial la transition facile à l'autorotation; la vitesse d'atterrissage d'autorotation des hélicoptères de coaxial-rotor est approximativement 15 km/h moins que cela des hélicoptères de simple-rotor dus au inférieur (par 20-30 m) nivelant avec un plus grand (par 10degrees) angle de lancement, qui est grâce possible à la commande longitudinale puissante et à peu de taille de l'hélicoptère de coaxial-rotor.
Peu de vitesses d'atterrissage augmentent la sûreté d'atterrissage, particulièrement en volant au-dessus du terrain cassé. Le problème de la stabilité directionnelle des hélicoptères de coaxial-rotor dans l'autorotation a été résolu dedans complètement.
En outre, des méthodes d'atterrissage d'autorotation ont été développées et adoptées, qui utilisent la fréquence de rotation de rotor qui est 3-4% moins que normalement. Ceci réduit le taux vertical de descente sensiblement (par 2 ou 3 m/sec), augmente des caractéristiques directionnelles d'efficacité et d'atterrissage de commande. En coopération avec des instituts de recherche de recherche de l'industrie de fabrication et du ministère de la défense, Kamov a entrepris un programme de recherche étendu de vols essais et de maquette consacré à l'anneau de vortex à l'appui du développement d'hélicoptère de coaxial-rotor. Les résultats confirment ce qui suit: la frontière supérieure de l'anneau de vortex pour les rotors supérieurs et inférieurs est la même avec le droit et les frontières inférieures de l'anneau de vortex (où les caractéristiques de ce mode sont minimales) sont légèrement plus étendues dans des hélicoptères de coaxial-rotor; pour l'hélicoptère de coaxial-rotor entrer dans le mode d'anneau de vortex et le sortir est sûr s'il y a assez de marge d'altitude pour laisser l'anneau de vortex (même est vrai pour l'hélicoptère de simple-rotor). Le facteur humain est fondamental pour la sûreté de vol. les hélicoptères de Coaxial-rotor étant plus faciles de piloter une meilleures contrôlabilité et manoeuvrabilité de vanterie aussi bien qu'une meilleure finesse et sont, ainsi, plus sûrs en comparaison de leurs concurrents de simple-rotor.
La dimension de l'hélicoptère est principale à sa sûreté de vol.
Taille de l'hélicoptère de coaxial-rotor peu d'augmente sa sûreté de vol à proximité des obstacles et à une basse altitude, qui est essentielle pour n'importe quel hélicoptère de combat.
Puisque la dimension de l'hélicoptère de coaxial-rotor assortit littéralement le diamètre de son rotor, il n'y a aucune chance pour qu'elle ait ses dommages d'empennage tout en volant près d'un certain obstacle. Cependant, l'empennage est endommagé ou perdu tout à fait (par exemple pendant l'atterrissage approximatif d'autorotation), c'est non pertinent pour la sûreté de vol. Comparant la sûreté de vol des hélicoptères de coaxial-rotor et de simple-rotor, les adversaires considèrent souvent l'issue de la rotor-lame recouvrant dans des hélicoptères de coaxial-rotor.
Il devrait mentionner l'issue des lames obtenant trop près du fuselage est topique pour l'avion à aile tournante, de tous les types. Basé sur des essais en laboratoire, la recherche expérimentale et l'analyse de données d'essai en vol, on l'a prouvé que des hélicoptères de coaxial-rotor fournissent la sûreté de vol en tous les modes de vol (y compris dans les acrobaties aériennes) en ce qui concerne la distance minimum de rotor-lame (rotor / pale).

Ka-50-2 (Alligator)
Les hélicoptères de Coaxial-rotor n'ont aucune restriction à guider des pédales vers la droite dans l'une ou l'autre direction à leur extrême aussi bien que sur effectuer de bons et virages à gauche.
L'impossibilité d'employer la pédale à leur pleine capacité est typique des hélicoptères de simple-rotor et est provoquée par des conditions de sûreté de vol à l'opération de rotor de queue. Ainsi, il est bien plus sûr voler l'hélicoptère à coaxial-rotor qu’avec le simple rotor.
http://www.kamov.ru/market/news/petr11.htm
(texte traduit en français avec le traducteur automatique du
site de Google. Nous nous excusons par avance des erreurs de traduction).
7 La théorie du moment
The first analytical theory
to consider for a helicopter in forward (nonaxial) flight is the momentum
theory. The analysis for vertical (axial) flight is very similar to that of a
simple propeller, and will not be discussed here. One notable result of that
analysis, however, is the induced velocity of the rotor in hover:
(Trad. Fr.
: La première théorie analytique à considérer pour un hélicoptère dans le vol
(non-axial) vers l'avant est la théorie d'élan. L'analyse pour le vol (axial) vertical est très semblable à celle
d'un propulseur simple, et ne sera pas discutée ici. Un résultat notable de cette analyse, cependant, est la vitesse
induite du rotor dans le vol plané:).
where w is the disc loading,
given by
(trad.fr.: où w est la charge du disque, donné par : )

In the terms of basic
momentum theory, the thrust of a rotor in nonaxial flight is very difficult to
derive. In the context of this discussion, a relationship for the thrust that
was proposed by Glauert in 1928 will be used. A simple diagram of an actuator
disk in nonaxial flow is depicted below.
(trad. Fr. : Dans les limites de la théorie de base d'élan, il est très difficile de déduire la poussée d'un rotor dans le vol non-axial. Dans le contexte de cette discussion, un rapport pour la poussée qui a été proposée par Glauert dans 1928 sera employé. Un diagramme simple d'un disque de déclencheur dans l'écoulement nonaxial est dépeint ci-dessous.).
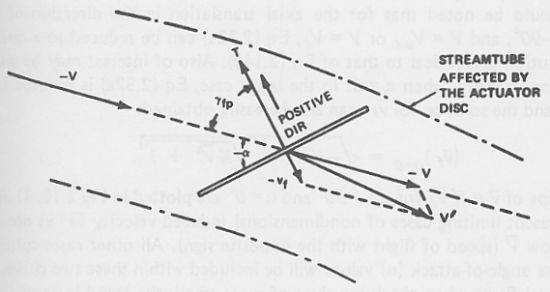
Actuator disk in nonaxial flow [from Stepniewski, 1979]
The thrust of the actuator
disk can be given by:
(Fr : La poussée du disque de déclencheur peut être donnée par: )
![]()
Far downstream from the disk,
the downwash vf is doubled. Also, the term ![]() becomes the mass flow through the stream tube that is
defined by the actuator disk. Some validity for these relationships can be
inferred by comparing them to the formula for the lift of a wing having 2R span
with a uniform downwash. The lift of such a wing is expressed by an equation
similar to that shown above. After assuming that this equation is valid,
determining the thrust requires that the induced velocity in forward flight be
determined:
becomes the mass flow through the stream tube that is
defined by the actuator disk. Some validity for these relationships can be
inferred by comparing them to the formula for the lift of a wing having 2R span
with a uniform downwash. The lift of such a wing is expressed by an equation
similar to that shown above. After assuming that this equation is valid,
determining the thrust requires that the induced velocity in forward flight be
determined:
(Fr : Loin en aval à partir du disque, le vf de downwash
est doublé. En outre, la limite ![]() devient
la masse traversent le tube de jet qui est défini par le disque de
déclencheur. De la validité pour ces
rapports peut être impliquée en les comparant à la formule pour l'ascenseur
d'une aile ayant l'envergure 2R à un downwash uniforme. L'ascenseur d'une telle aile est exprimé par
une équation semblable à cela montré ci-dessus. Après avoir supposé que cette équation est valide, déterminant la
poussée exige que la vitesse induite dans le vol vers l'avant soit
déterminée:).
devient
la masse traversent le tube de jet qui est défini par le disque de
déclencheur. De la validité pour ces
rapports peut être impliquée en les comparant à la formule pour l'ascenseur
d'une aile ayant l'envergure 2R à un downwash uniforme. L'ascenseur d'une telle aile est exprimé par
une équation semblable à cela montré ci-dessus. Après avoir supposé que cette équation est valide, déterminant la
poussée exige que la vitesse induite dans le vol vers l'avant soit
déterminée:).
Unfortunately, this equation
does not allow a determination of vf, since V´ is also dependent on
vf. In order to solve for the induced velocity, V´ must first be
expressed in terms of V and vf:
(Fr : Malheureusement, cette équation ne permet pas une détermination de vf, puisque V'dépend également de vf. Afin de résoudre pour la vitesse induite, V'doit d'abord être exprimé en termes de V et vf:)
![]()
This value for V´ can then be
substituted back into the thrust equation, which can then be non
dimensionalized by vh (overbars denote non dimensional values):
(Fr : Cette valeur pour V'peut alors être substituée de nouveau dans l'équation de poussée, qui peut alors être non dimensionalized par le vh (les overbars dénotent des valeurs non dimensionnelles): ).
![]()
The above equation can now be
solved either graphically or with an iteration scheme. As a check of validity,
if this equation is solved for an a of 0°, the solution matches that of the axial case. The other extreme
case, where a=-90°, represents the other
limiting case of helicopter forward flight. The non dimensional induced
velocity versus the non dimensional flight velocity for both limiting cases are
plotted below.
(Fr : L'équation ci-dessus peut être maintenant résolue graphiquement ou avec un arrangement d'itération. Comme contrôle de validité, si cette équation est résolue pour un a de 0°, la solution assortit cela du cas axial. L'autre cas extrême, où a=-90°, représente l'autre cas de limitation du vol d'hélicoptère en avant. La vitesse induite non dimensionnelle contre la vitesse non dimensionnelle de vol pour les deux cas de limitation sont tracées ci-dessous. ).
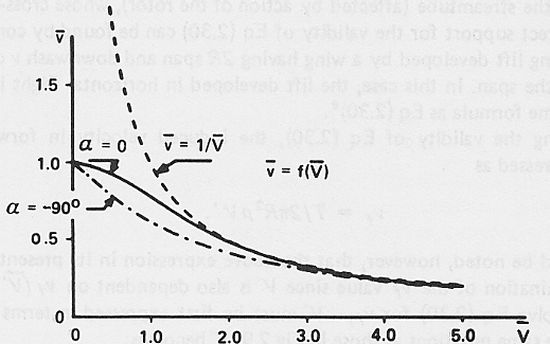
Nondimensional induced velocity versus nondimensional flight velocity [from Stepniewski, 1979]
While
most cases of forward flight occur at small a, in which case the a=0° curve
would be very representative, all other intermediate cases of flight are within
the two curves. It is important to note that beyond a nondimensional flow
velocity of about 3, the two curves are almost coincident, and can be approximated
by 1/![]() .
.
(Fr : Tandis que la
plupart des cas de vol vers l'avant se produisent à petit a, dans ce cas la
courbe d'a=0° serait très représentative, tous autres cas intermédiaires de vol
sont dans les deux courbes. Il est
important de noter qu'au delà d'une vitesse d'écoulement de nondimensional
environ de 3, les deux courbes sont presque coïncidentes, et peut être
rapproché par 1/![]() .
).
.
).
Source : http://www.aerospaceweb.org/design/helicopter/momentum.shtml
Tête simple
rotor (donné pour exemple, pour montrer sa complexité et tiré du même site
ci-avant).
Tête de rotor d’hélicoptère Eurocopter EC120
(ci-après) :
|
|
• simple
• aucun roulement
à billes • conditionnelle Type: Conception de Spheriflex sans
des roulements de contact de roulement.
Trois roulements sphériques stratifiés d'élastomère fournissent des
fonctions de « battement », de drague et d'incidence par la déformation
élastique. Cette conception efficace
et fiable permet de réduire l'entretien et la maintenance conditionnelle. |
• simple • no ball bearing • on condition Type: Spheriflex
design with no rolling contact bearings. Three laminated elastomer spherical
bearings provide flapping, drag and incidence functions by elastic
deformation. This effective and reliable design allows reduced servicing and
on-condition maintenance. |

![]() Pitch change lever
Pitch change lever
![]() Spherical thrust bearing
Spherical thrust bearing
![]() Frequency adaptator
Frequency adaptator
![]() Blade sleeve
Blade sleeve
![]() Hub
Hub
![]() Droop
restrainers
Droop
restrainers
8 Bibliographie
Commande des systèmes :
Conception, identification et mise en œuvre de Ioan Doré Landau.
Contacter l'auteur : Laboratoire d'Automatique de
Grenoble - ENSIEG – INPG, Rue de la Houille Blanche, Domaine Universitaire,
B.P. 46, 38402 Saint Martin d'Hères, France, e-mail : landau@lag.ensieg.inpg.fr
http://www-lag.ensieg.inpg.fr/landau/bookIC/french/index.htm
Plan de cet ouvrage :
Préface
[33 Ko]
Liste
de notations principales [15 Ko]
Chapitre
1. Rappel sur la régulation analogique
Chapitre
2. Systèmes de commande par calculateur
Chapitre
3. Méthodes de calcul des régulateurs numériques
Chapitre
4. Méthodes de calcul des régulateurs numériques en présence de
perturbations aléatoires
Chapitre
5. Identification des modèles de procédés : les bases
Chapitre
6. Méthodes d'identification
Chapitre
7. Aspects pratiques de l'identification
Chapitre
8. Aspects pratiques de la régulation numérique
Chapitre
9. Identification en boucle fermée
Chapitre
10. Réduction de la complexité des régulateurs
Références
[38 Ko]
Index
[15 Ko]